
Astronauts on ISS control robots remotely
Space robotics has had an exciting year — ranging from International Space Station remote robot control technology demonstrations and on-orbit servicing mission milestones to commercial lunar missions and Earth demonstrations of future Mars mission technologies.
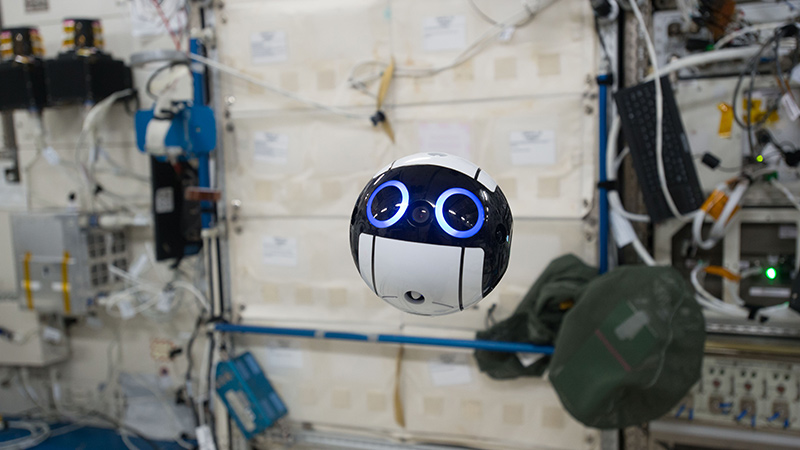
In June, the Japanese Aerospace Exploration Agency delivered Int-Ball to the ISS. Int-Ball is an autonomous camera drone that’s controlled from JAXA’s Tsukuba Space Center in Japan. By contrast, in August, Italian astronaut Paolo Nespoli controlled a robot called Rollin’ Justin — in Oberpfaffenhofen near Munich — from the ISS in a European Space Agency experiment to demonstrate robot control in a future Mars mission. The German robot completed complex tasks in a semi-autonomous capacity.
In February, NASA’s Goddard Space Flight Center Satellite Servicing Projects Division’s Raven module launched to the ISS. The Raven demonstration tracks incoming payloads to the ISS with machine vision, closed-loop rendezvous. The Satellite Servicing Projects Division completed development efforts and fabrication for Robotic Refueling Mission 3 and is working toward completing system integration and testing. Robotic Refueling Mission 3 will demonstrate the never-before-attempted transfer of cryogens and xenon on-orbit in early 2018. Robotic Refueling Mission 1 received the AIAA Space Automation and Robotics Technical Excellence Award in September.
The Satellite Servicing Projects Division reviewed in June and July NASA preliminary designs for the Restore-L mission payload and bus. Restore-L will for the first time robotically refuel a satellite not designed to be serviced on-orbit.
For on-orbit servicing, Space Systems Loral, based in Palo Alto, California, secured a contract in February with DARPA for the Robotics Servicing of Geosynchronous Satellites program. The program aims to perform high-resolution inspections; correction of mechanical anomalies such as solar array and antenna deployment malfunctions; assistance with relocation and other orbital maneuvers; installation of attachable payloads, enabling upgrades or entirely new capabilities for existing assets; and satellite refueling. In addition, in September, Space System Loral completed a major ground demonstration of an ultra-light robotic system and advanced command and control software for NASA’s Dragonfly program for on-orbit satellite assembly.
After 10 years of competition under the Google Lunar XPRIZE, five finalist teams — the United States’ Moon Express, Japan’s Hakuto, India’s Team Indus, Israel’s SpaceIL and an international team Synergy Moon — have secured launches by the end of this year for sending each team’s spacecraft to the moon. The XPRIZE Foundation will award a total of $30 million. The first $20 million will be awarded to the first privately funded team to land a spacecraft on the moon, travel 500 meters and transmit HD video and images of its mission back to Earth. Two other $5 million prizes will go to the second-place winner and as a bonus for completing extra tasks like surviving the lunar night.
NASA’s Jet Propulsion Laboratory in Pasadena, California, has developed several key technologies for the Mars Curiosity rover. The six aluminum wheels on the rover are starting to show significant signs of wear after traveling more than four years and 17 kilometers on Mars. In March, JPL uploaded to the rover a new algorithm to use real-time data to adjust each wheel’s speed, reducing pressure from rocks. In February, JPL used artificial intelligence and the Opportunity rover to capture dust devils swirling across the Martian surface.
NASA’s Centennial Challenges program held the Space Robotics Challenge in June. Twenty of 400 teams were selected for the final competition. Four teams won a total of $300,000 for completing a series of simulation tasks in a virtual environment while controlling the Robonaut 5 Valkyrie robot from Johnson Space Center in Houston. The tasks simulated rectifying failures of future Mars missions, including aligning a communications dish, repairing a solar array and fixing a habitat leak.
