
Autonomous drone test opens up possibility of low-level urban flights
The Institute of Flight Systems at the German Aerospace Center, or DLR, accomplished safe and high-performance flight testing of its hardware and software package that enables low-level autonomous drone flight for urban environment scenarios. The June flight test in Rosenkrug, Germany, required stringent safety considerations due to the close proximity of obstacles and high velocities flown. The benefits of DLR’s sensor fusion and mission re-planning approach come from a high rate of environment data fusion and obstacle classification combined with DLR’s unique multiquery kinematic path re-planning. The package was retrofitted aboard an 85-kilogram SDO 50 V2 SwissDrones-based rotorcraft with a superARTIS autopilot.
Significant advances were made in human-autonomy teaming in 2017. In February, Aurora Flight Sciences performed a flight demonstration and at-altitude landing of the Aircrew Labor In-Cockpit Automation System in a Diamond DA42 aircraft. ALIAS acts as a pilot’s assistant, capable of operating an aircraft from takeoff to landing, including contingencies. Developed with DARPA funding, ALIAS is designed to ultimately enable reduced crew operations. In the past two years, Aurora Flight Sciences developed, integrated and tested instantiations of ALIAS in five aircraft. ALIAS is configured to fly a particular aircraft through an offline knowledge acquisition process that rapidly trains ALIAS to be transitioned to new types of cockpits. The core and user interface systems were developed to be vehicle-agnostic, incorporating open architecture principles to easily integrate different types of actuation or perception solutions as well as third-party applications.
Flight tests of an upset recovery guidance system were conducted in April. The system was developed under Small Business Innovative Research contracts with Barron Associates Inc. and Systems Technology and tested by Calspan on its variable-stability Learjet 25B aircraft. This work, sponsored by NASA’s Langley Research Center’s Vehicle Systems Safety Technologies Project, was led by Christine Belcastro. The system provides pop-up recovery guidance cues to pilots on the primary flight display when an upset condition is detected and is effective for nominal and impaired aircraft. The system improved the recovery proficiency of pilots in all tested scenarios and often reduced over-controlling and oscillations.
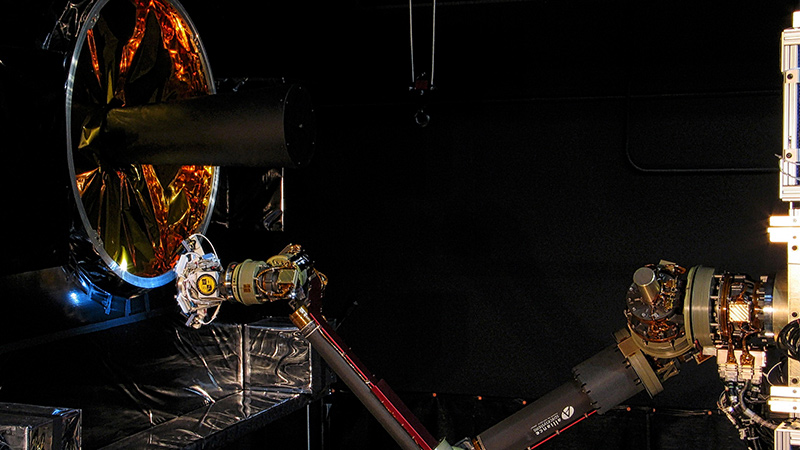
Space-related gains in intelligent systems were seen in 2017. DARPA announced in February that it would join with Space Systems Loral on the Robotic Servicing of Geosynchronous Satellites program. The RSGS program builds on a decade of work by DARPA and U.S. Naval Research Laboratory, along with efforts from university researchers and space agencies around the world. The project aims to develop a robotic servicing spacecraft that can work on satellites that were never designed to be serviced. The RSGS project is slated for launch in the early 2020s. NASA’s Restore-L project, which proposes to refuel and relocate a satellite in low Earth orbit, is on a similar schedule. If successful, these two missions will push the limits of automation and robotic operation in space.
Contributors: Jessica Duda, Alexander Stimpson, Florian Adolf, Christine Belcastro and Glenn Henshaw
