
New mission concepts emerge
After a flurry of missions the past several years, the community this year focused on developing new concepts for tether transport systems, as well as the subsystems required to realize space tether missions and prepare for future flight opportunities.
Through two projects funded by the National Science Foundation, researchers at the University at Buffalo in New York carried out research on tethers for the capture and removal of uncooperative space objects. In January, they described relative distance controllers for a chaser-tether-target system and analyzed the controllers’ performance, focusing on safety. In July, the researchers demonstrated a decentralized actuation system combined with reinforcement learning for increasing the robustness of target capture via a net. In September, they proposed an estimation algorithm to determine the inertia parameters of tethered uncooperative space debris using landmark tracking and a tension sensor.
In January, researchers at Nanjing University of Aeronautics and Astronautics, with funding from the National Natural Science Foundation of China and the Qing Lan Project of Jiangsu Province universities and colleges, proposed a deep learning scheme of nonlinear predictive control for deorbiting an electrodynamic tether. In their scheme, a large dataset is generated first via a conventional control law to train a deep neural network. Then, the trained deep neural network realizes the real-time mapping from the system state to the system control, thereby providing feedback control of the system deorbit with low computational cost.
Through funding from the Russian Science Foundation, researchers at Samara University in August delivered their study on using a tethered system to explore the surface of Phobos, a Martian moon. They analyzed the dynamics of a tether in the framework of the circular restricted three-body problem. They presented two cases: one of tether attachment to a spacecraft located at the libration point of the Mars-Phobos system, and another moving in a quasi-satellite orbit around Phobos. The researchers proposed control laws for tether tension and end-body thrusters, and their results were validated via numerical simulations.
Researchers at the University of Strathclyde in Scotland investigated the potential for two-way Earth-Mars exchanges of freight payloads using motorized momentum exchange tethers. They presented their methodology, which identified possible orbits for symmetrical double-payloaded motorized tethers and for their payloads around both Earth and Mars, by applying reusable dummy payloads for symmetrical load balancing. In all cases, the orbits of the tethers were highly elliptical with apoapsis radii greater than 50,000 kilometers, which allows the tethers to have velocities close to, but below, the escape velocity at the periapsis of their corresponding orbits. They also began research on the use of a spaceplane for payload delivery and reconnaissance and the recapture of missed payloads.
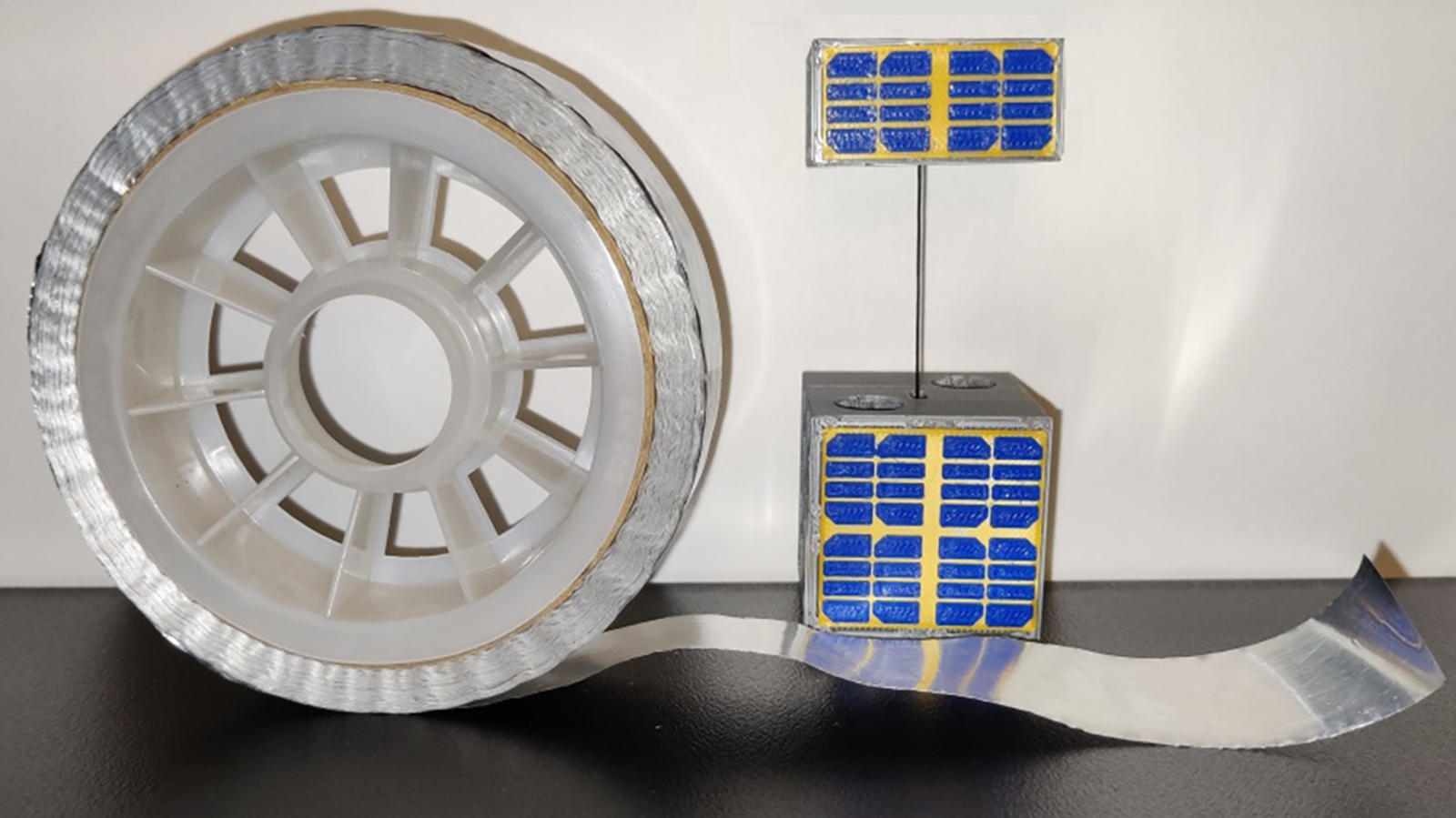
In April, manufacturing of a 12-unit, 24-kilogram deorbit device was begun under the Electrodynamic Tether Technology for Passive Consumable-less Deorbit Kit-Fly, or E.T.PACK-F, project funded by the European Innovation Council. In October, they began integrating their model with a 1-kilogram, 500-meter aluminum tape tether for electrodynamic drag. Plans call for the qualification, production and testing of a flight model in 2024 in preparation for a mid-2025 in-orbit demonstration funded by the European Commission. The E.T.PACK-F consortium is coordinated by the Universidad Carlos III de Madrid, in collaboration with the University of Padova in Italy, the Technical University of Dresden in Germany, the Spanish company SENER Aeroespacial and the German startup Rocket Factory Augsburg.
