
Intelligent systems advance in communication, planning, perception and safety

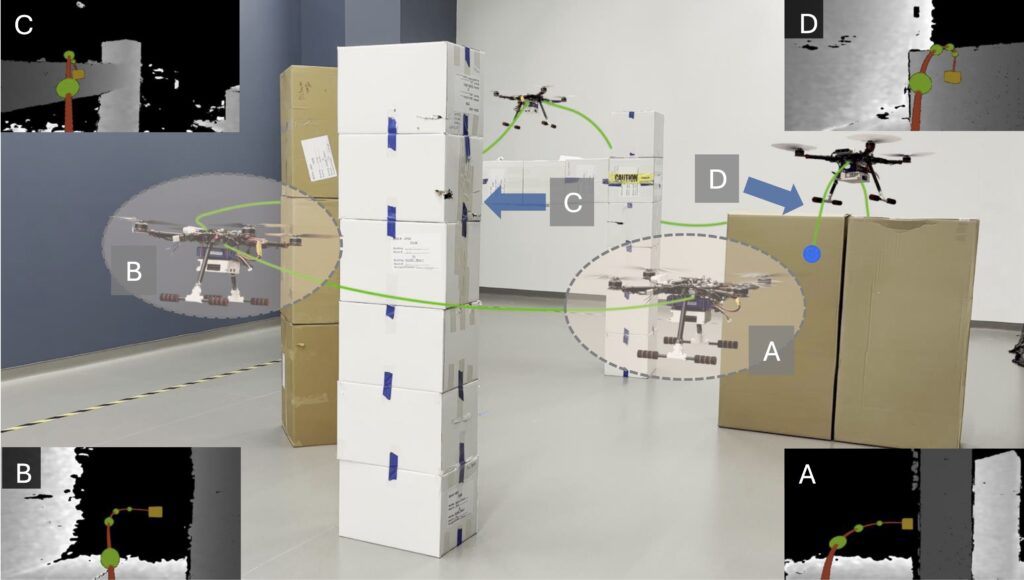
In March, researchers in Penn State’s Aerospace Engineering Department completed validation flights of a new self-supervised learning framework for autonomous uncrewed aircraft system (UAS) trajectory planning. This approach combines learning-based perception with differentiable, physics-aware trajectory optimization to generate dynamically feasible flight paths in real time. The system uses geometry-derived collision signals from a 3D map instead of manually labeled data or expert demonstration trajectories, which significantly reduces the data collection burden and improves generalization to new environments. Validation tests required aggressive maneuvering through three-dimensional obstacle courses and demonstrated direct sim-to-real transfer. These flights represented a significant advance toward agile and safe autonomy in complex, GPS-denied environments.
In April, researchers from the NASA-funded Jet Propulsion Laboratory and Caltech field tested autonomous long-range rover navigation, an enabling capability for the Endurance mission concept that includes a lunar sample return rover. The team traversed varied terrain topographies during the day, night, and twilight with autonomy software aboard ERNEST, a half-scale Endurance rover, in the California desert south of the Salton Sea. During the continuous 48-hour test, the rover traversed a total of 15.7 kilometers with 21 hours of actual driving, a maximum speed of 1 kph, and an average of 0.7 kph, exceeding mission requirements.
In May, researchers under NASA University Initiative: Robust and Resilient Autonomy for Advanced Air Mobility demonstrated their integrated research in a field test at the University of Nevada-Reno, capping a 2.5-year research effort. Participants from multiple universities, led by the University of Illinois Urbana-Champaign’s Aviate Center, demonstrated autonomous capabilities on several platforms and in different environments. Major highlights were autonomous emergency landing using real-time onboard perception while executing a preplanned survey mission interrupted by a simulated fault, and automatic replanning and trajectory execution with a formal safety guarantee in response to a simulated obstacle detection.

In June, the Starling Formation-Flying Optical Experiment used accurate bearing angle measurements from space-based optical sensors to precisely identify unknown Resident Space Objects by matching them to a catalog. This was one of many milestones achieved by NASA’s Starling program as it advanced spacecraft autonomy through in-space experiments on its four cubesats. Breakthroughs in autonomous networking, reconfiguration, distributed state sharing and angles-only navigation have redefined multiagent swarm operations. These accomplishments mark a transformative step in autonomous space systems, paving the way for safer, more efficient operations in increasingly congested orbital environments.
In July, 3Laws Robotics and the U.S. Air Force Test Pilot School launched a program to extend the Guardrails run time assurance system from human pilots to AI agents. Guardrails constrain aircraft to defined envelopes, preventing violations while enabling aggressive testing. In previous tests on the X-62 VISTA aircraft, human pilots attempted to exceed geofencing, altitude, and g-limit boundaries but could not break Guardrails. Phase 1 of the 2025 project integrated with an AI pilot in simulation, ensuring safety even during unsafe maneuvers. The effort adds new, novel safety metrics for AI agents, and paves the way for future flight tests.
In September the NASA University Leadership Initiative kicked off Communication-Aware Dispersed Autonomy and Safety (CODAS), one of three new University Leadership Initiative projects. CODAS will provide tools and techniques for understanding and exploiting the dynamic communication environment experienced by collaborative autonomous aviation systems. The main innovation is to treat communication as a variable that can be learned, predicted, and controlled, rather than just a barrier to be overcome. Led by the University of Colorado Boulder, the team comprises researchers in uncrewed aircraft systems, wireless communication, and artificial intelligence across 10 universities and colleges, Boeing subsidiary Aurora Flight Sciences and the Charles Stark Draper Laboratory.
Contributors: Junyi Geng, Issa Nesnas, Saptarshi Bandyopadhyay, Irene Gregory, Jeremy Frank, Andrew Singletary, Kerianne Hobbs, Eric Frew
Opener image: The Jet Propulsion Laboratory and Caltech in April 2025 completed autonomous navigation tests with ERNEST, a half-scale prototype of a proposed lunar sample return rover named Endurance. Credit: NASA/JPL-Caltech
