
Robots assisting astronauts, servicing ISS and assembling
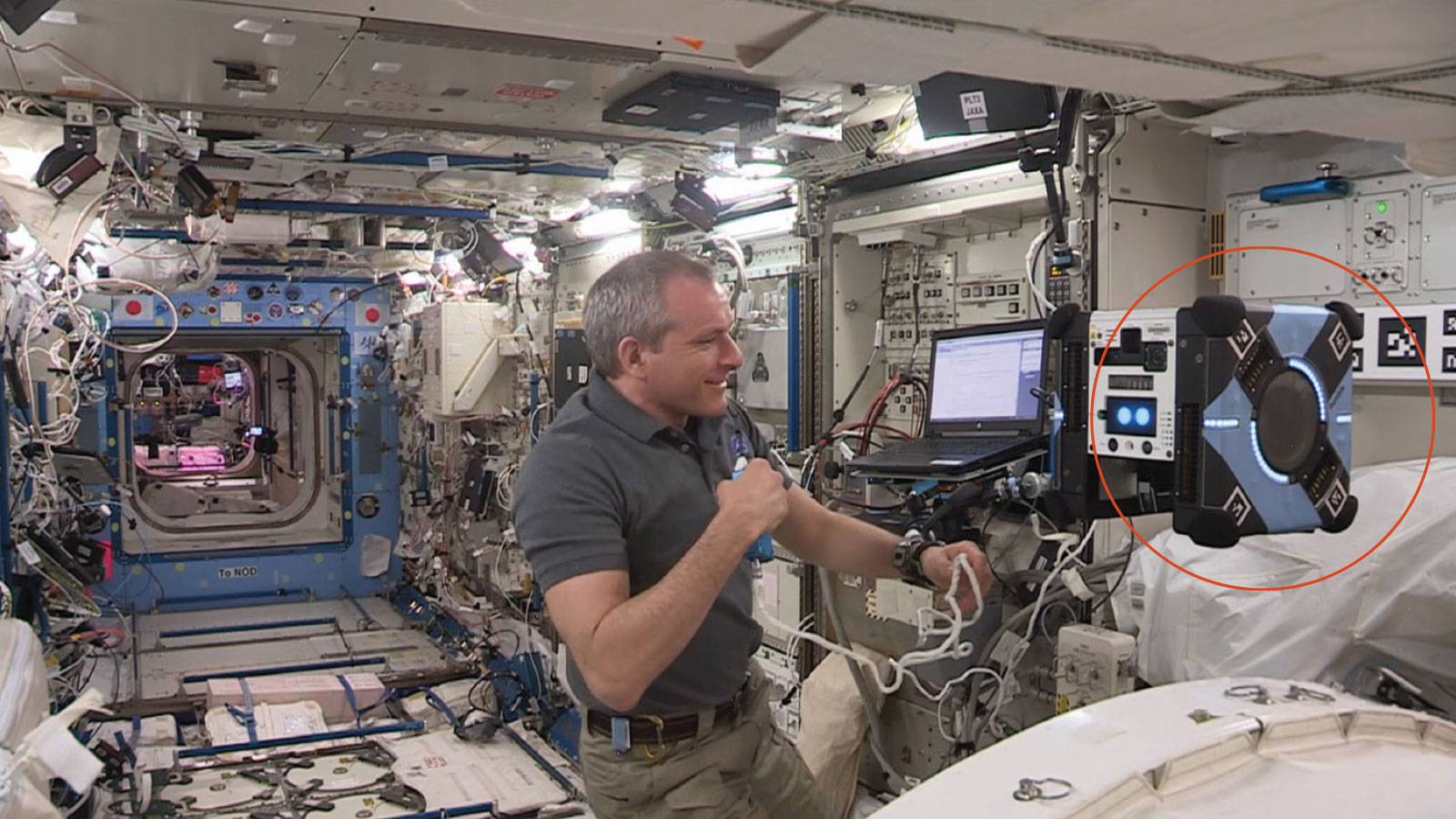
In June, “Bumble Bee” became the first of three Astrobee robots to fly under its own power in space. The Astrobees are designed to operate inside the International Space Station using electric fans for propulsion and computer vision for navigation. The robots can be equipped with a small arm that allows them to grasp handrails or carry small items to perform tasks, such as inventory, sensor surveys and mobile camera work.
Early this year, the Satellite Servicing Projects Division’s Restore-L, which will robotically inspect, refuel and relocate a satellite not designed to be serviced, completed its spacecraft bus critical design review. In September, NASA awarded a contract to Colorado-based Maxar Technologies to add an additional payload to Restore-L that will demonstrate boom manufacturing and in-space assembly of a fully functional communications antenna with a robotic arm. In August, the division’s Robotic Refueling Mission 3 completed an initial set of tool operations, bringing in-space refueling closer to reality. ISS’s Dextre robot operated and demonstrated the first of three tools needed to transfer liquid methane from one tank to another. The ability to transfer and store cryogenic fluid such as liquid methane in space could help enable human travel to the moon, Mars and beyond. Robotic Refueling Mission 3 launched to the ISS in December 2018 and, after four months, demonstrated the longest zero boil-off storage of liquid methane. In August, the Satellite Servicing Projects Division completed the development, build and delivery of the robotic tool stowage payload. When affixed to the outside of the ISS, the receptacle will house two robotic external leak locator units, developed by the division in partnership with NASA’s Johnson Space Center in Texas.
In August, Russia launched a final experimental demonstration object research robot named Skybot F-850 to the ISS for testing, where it demonstrated interaction and tool exchange in collaboration with cosmonauts Aleksander Skvortsov and Alexey Ovchinin.
In July, the India Space Research Organization launched the Chandrayaan-2 lunar exploration mission, which included the Vikram lander and the Pragyan lunar rover. The Pragyan rover was intended to travel up to 500 meters over one lunar day and would have collected data determining elemental abundance. However, in September, the agency lost contact with Vikram as it attempted landing.
NASA’s Mars Helicopter flight hardware completed flight testing in the 25-foot-wide (7.6 meter) thermal vacuum chamber at NASA’s Jet Propulsion Laboratory in California in January. It was attached to the Mars 2020 Rover in August for launch in July 2020.
In May, a power switching unit failure on the ISS caused several subsystem power outages and grounded a SpaceX resupply launch. A high-priority removal and replacement operation was conducted in three days with the Canadian Dextre robot replacing the failed unit and restoring the ISS to full power. In February, Canada announced it would join NASA’s Artemis lunar Gateway program with Canadarm 3, which will use artificial intelligence to operate autonomously. In August, the Canadian Space Agency awarded Canada-based MDA, the maker of the first two Canadarms, Phase A work for the Gateway external robotic interfaces of the Deep Space Exploration Robotics program. In June, MDA delivered the European Space Agency’s Exo-Mars chassis and locomotion subsystem for the rover’s launching in 2020. By the end of July, the MDA-built OSIRIS-REx Laser Altimeter instrument had made 2 billion measurements on NASA’s mission to sample the near-Earth asteroid Bennu.
NASA’s Active Response Gravity Offload System was used for development and training for the ISS antimatter measurement payload, Alpha Magnetic Spectrometer or AMS-02, repair mission. The ARGOS robot simulated a microgravity environment, allowing engineers and crew members wearing fully pressurized space suits to develop and train for the complex repair procedure on a high-fidelity mockup of the AMS-02 payload.
Contributors: Terry Fong, Robert Savely, Paul Valle, Stayne Hoff, Joseph Parrish and Brook Sullivan
