
Spaceflight labs in China have devised concepts for Martian rotorcraft, including a quadcopter and an octocopter capable of scouting terrain and gathering samples. The designs could figure into whether China beats the U.S. in the quest to be first to deliver bits of Mars to Earth. Paul Marks analyzed the scientific papers.
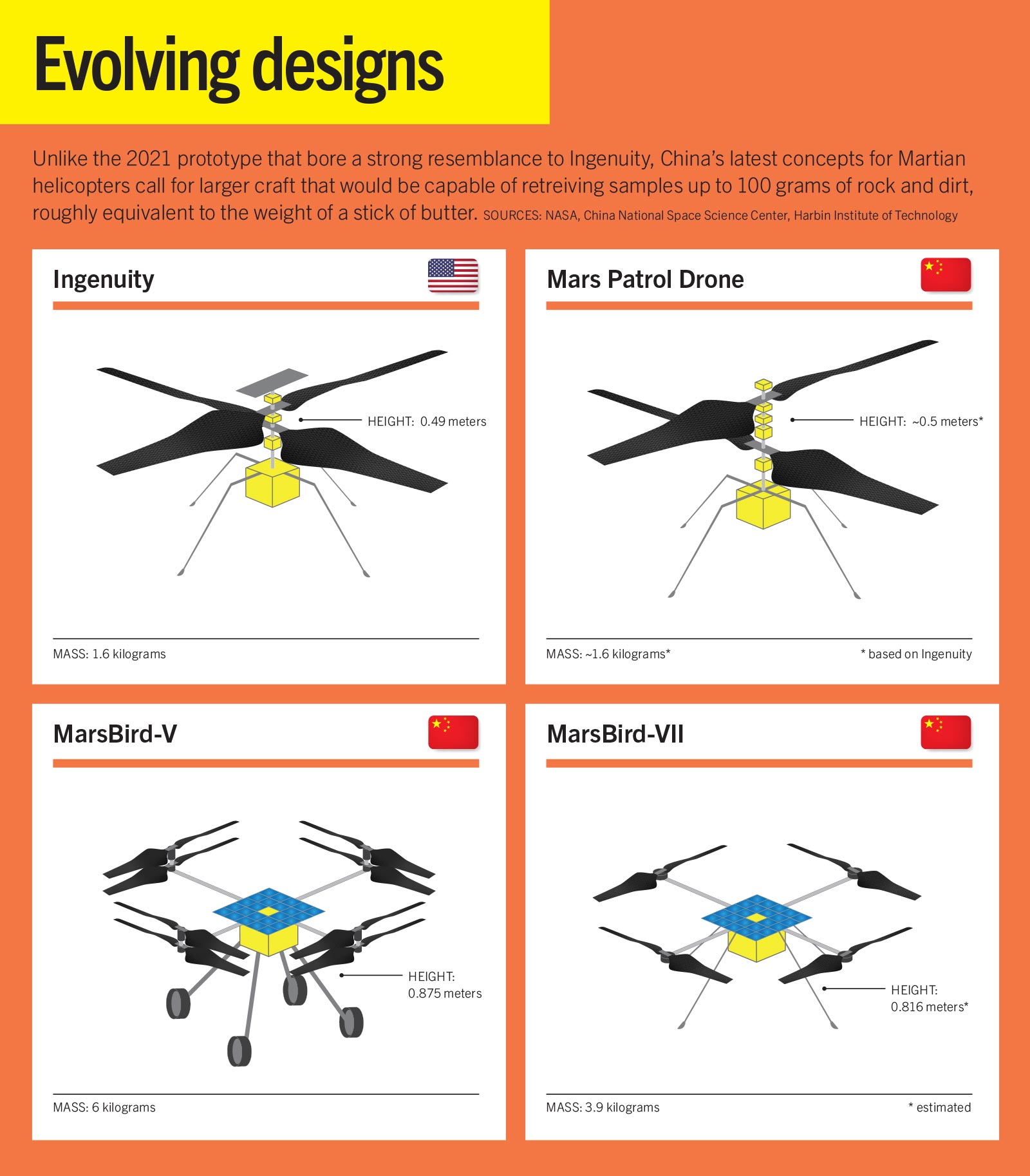
There wasn’t a whole lot to laugh about during the covid-19 pandemic, but on Sept. 1, 2021, China’s National Space Science Center provided some welcome relief when it posted a photo of a prototype helicopter it had put together in its lab. This “Mars Patrol Drone,” as the NSSC website called it, quickly provoked widespread mockery online. The coaxial-rotored, skinny-legged helo was clearly a clone of Ingenuity, NASA’s heroic little Mars helicopter, which only five months earlier had become the first rotorcraft to achieve powered, controlled aerodynamic flight on a celestial body beyond Earth.
Space journalist Andrew Jones tweeted that the photo represented “more Familiarity than Ingenuity.” And both the technology news site Gizmodo and the European spaceflight journal Room used the same phrase — “striking resemblance” — in reference to the Chinese concept and the Jet Propulsion Laboratory’s celebrated helicopter.
In the years since, however, information shared publicly by China’s space sector in the scientific literature suggests the nation’s aims have grown more ambitious in terms of the size of Mars rotorcraft, and more advanced in terms of design methodology. But like their counterparts at NASA, NSSC and other labs that prepare spacecraft and mission concepts for the China National Space Administration also face uncertainty in planning a mission to retrieve Mars samples.
For this account, I emailed two of the principal engineers on three Chinese Martian rotorcraft research papers, seeking detail about their thinking and what role their concepts might play in Tianwen-3, China’s proposed sample return mission. Liftoff is baselined for 2030, two years after NASA was to launch its Mars Sample Retrieval Lander, the next phase of the joint Mars Sample Return Mission with the European Space Agency. That date seems likely to change: NASA last month began soliciting proposals from its workforce and industry for “alternate” architectures, after an independent review board last year concluded that the current MSR plan could cost up to $11 billion and return samples in 2040 — which Administrator Bill Nelson dubbed “too expensive” and “unacceptably too long.”
I’ve had success in the past reaching Chinese researchers, but now a nonresponse feels like the usual for me. That was the case here, so what follows is based on the three technical papers, reporting by the space and broadcast news media, and the voluminous materials NASA has released on Ingenuity’s performance.
Based on that public record, the fate of China’s Ingenuity clone appears uncertain as well. Last year, SpaceNews reported that the Mars Patrol Drone was under consideration for Tianwen-3, competing with a six-legged ground robot for the role of additional sample collector. But in March, the airborne option evaporated, with China Central Television screening an animation of Tianwen-3 that showed the ground robot as the chosen assistant.
But all hope isn’t lost. Whether for Tianwen-3 or future sample returns, concepts for larger multirotor craft are in the works at the Harbin Institute of Technology in Heilongjiang province, northeast China. The researchers outlined their proposed MarsBird-VII quadcopter and MarsBird-V octocopter, and how they’ll engineer them, in three research papers published online between March 2023 and January 2024 in Acta Astronautica, the English-language journal of the Paris-based International Academy of Astronautics. The research detailed in all three papers was funded by the National Natural Science Foundation of China and the Fundamental Research Fund for the Central Universities, national research organizations analogous to the U.S. National Science Foundation.
Even these papers pay homage to Ingenuity, frequently referencing many of the design, simulation and test studies published by JPL in Pasadena, California, and its lead contractor, AeroVironment, the California-based drone maker that designed, developed and built the helicopter to JPL’s specs.
It’s not hard to see why it’s such an influence: Expected to fly just five demonstration scouting sorties for the Perseverance rover, Ingenuity ended up flying 72 times, with a total flight time of 2 hours and 9 minutes, covering a distance of 17 kilometers and at altitudes of up to 24 meters at maximum ground speeds of 10 meters per second — and all in Martian air with a density just 1% of that on Earth.
In one of the papers, the Harbin researchers acknowledge Ingenuity’s scouting performance as an inspiration, showing that helicopters can “swiftly traverse extensive distances” and “circumvent obstacles.” In another, they are impressed with the way the helo extends surface exploration to “cliffs, caves, hills, and other complex topographical areas” that rovers cannot reach.
A foldable quadcopter
So how have they channeled this inspiration into concepts for designs and simulations that might one day lead to hardware that actually flies on Mars? The lowest rotor-count design, MarsBird-VII, is the work of a team led by engineers Qiquan Quan and Kaijie Zhu. This 4-kilogram composite quadcopter is basically an outsize terrestrial drone in terms of its airframe format, with static, skinny legs for landing gear.
“MarsBird-VII generates propulsion and steering torque through a system of four axis-parallel rotors, which are attached to the fuselage sidewalls via rotor arms,” the paper reads. “The landing gear consists of four legs, each of which is located below the rotor arm.”
Like any garden variety quadcopter on Earth, this airframe format allows MarsBird-VII to lift off and steer via differential thrust from its four composite rotors, avoiding the need for complex helicopter-style “collective” controls (for lift generation) and “cyclic” controls (for adjusting rotor disk angle), which Ingenuity had on both its rotors. This rids the design of the heavy mechanical linkages needed for altering the angle at which each rotor disk cuts into the air, as steering is wholly performed by adjusting the relative speeds of each rotor.
Another possible role for MarsBird-VII, either in Tianwen-3 or undecided future missions, would be photographing the surface in a series of autonomous sorties lasting up to 250 seconds each. (Ingenuity’s longest duration flight was 169 seconds, achieved on its 12th sortie.) With a slimline robot arm and gripper slung beneath its belly, the quadcopter could also autonomously pick up rock samples with masses up to 100 grams, the paper reads.
The Harbin engineers have also thought hard about the robotics and origami that will be involved in packing and unpacking something larger than Ingenuity. With just two coaxial rotors, the diminutive Ingenuity was able to be slung beneath the Perseverance rover then deployed by robotically swinging its body (its avionics and battery box) downward. After pinging down its landing gear legs, the helo dropped on the surface and Perseverance drove off, leaving Ingenuity exposed and ready for flight.
For MarsBird-VII, some drone origami was required: “The MarsBird-VII’s blades, rotor arms and landing gear are all folded to reduce the envelope size for launch. The rotor arms and landing legs can be folded closer to the fuselage during the launch and in-orbit phases to reduce overall volume,” the paper reads.
So plans call for the folded up quadcopter to ride along to Mars inside a six-sided container aboard the rover, whose robotic arm would place the box on the surface after arrival — an interesting idea but one that could also be a potential point of failure, compared to the simplicity of Ingenuity’s deployment.
A Darwinian octocopter
The other Martian drone that the Harbin team is conceptualizing and simulating is an octocopter. With its longer rotors and increased battery power over the quadcopter, MarsBird-V would be able to fly up to 420 seconds and retrieve a greater mass of samples (though the paper did not specify a figure).
Another big design difference: With motor-driven landing-gear wheels and a robot arm and gripper, MarsBird-V could land and roll right up to geological formations of interest. After returning to the rover or lander, MarsBird-V could approach at similarly close quarters for its arm and gripper to do a sample handover, says the Harbin team. This also happens to be the modus operandi of a second-generation version of Ingenuity prototyped by AeroVironment [see sidebar for more details].
But all this capability comes at a cost in terms of mass. With four more rotors than MarsBird-VII, plus the additional robotics and batteries, the mass of MarsBird-V is at least 6 kg — 50% higher than that of the quadcopter. So the Harbin team has had to squeeze the maximum possible thrust from air-density-starved Martian rotors for the least possible power input to maximize its range.
To do this, the authors turned to an engineering optimization technique called evolutionary computation, described in one of their papers. Here, a genetic algorithm, or GA, is harnessed to attempt to evolve the best three-dimensional rotor shape — akin to how Darwinian natural selection eventually breeds the fittest plants and creatures through random mutations. A GA mimics natural selection by describing key parts of an engineering design as if it were a genome, constructed from interconnected numeric segments — analogous to chromosomes — that each describe important parameters of an invention: length, for instance, as well as curvature, stiffness, mass, electrical resistance, drag and density.
By having a computer randomly alter the numbers for such parameters — akin to the copying errors that occur in DNA replication — the GA “mutates” the design. Some results will be awful, and computational fluid dynamics simulations of their performance will see that they are discarded, but some will have evolved strong advantages. And by breeding these best ones together, again and again, the design gradually improves. So a GA is, basically, a search engine for an optimum design solution.

The big question, however, is precisely which design parameters are chosen for mutation. To ensure that MarsBird-V’s eight rotors had the lowest power requirement for the greatest thrust, lead researcher Quan and his colleagues charged their GA with the task of optimizing how the pitch angle of the rotor blades varied along their span and the rotor’s “solidity,” the ratio of the area of the rotor blades to the swept area of the rotor disk.
Although they did not build a MarsBird-V prototype, they did manufacture the GA-evolved rotors and tested them in a Martian atmosphere simulator. The result: The Harbin team’s GA managed to reengineer the 3D shape of the octocopter’s rotor blade such that it achieved a 25.6% reduction in motor power consumption for the same thrust. The exercise illustrated that evolutionary algorithms “represent a promising avenue for improving the efficiency of Mars multirotor aircraft,” the researchers wrote.
Once again, however, the Chinese are a little behind the curve. NASA has already optimized Mars rotors using evolutionary algorithms. At the 2020 AIAA SciTech Forum in Florida, a team from NASA’s Ames Research Center in California revealed how it had optimized rotors for the proposed six-rotor Mars Science Helicopter via a GA.
Meanwhile, on the packaging front, MarsBird-V’s deployment origami is a stage more complex than that of the quadcopter: “MarsBird-V is constrained for launch within an octagonal prism-shaped envelope and gradually unfolds using a lifting mechanism,” the team wrote.
Race to Mars
Despite this complexity, it is possible that China’s Tianwen-3 could be the first to deliver Martian rock and regolith to Earth. NASA planetary science chief Nicky Fox told reporters last month that she wants the samples retrieved before 2040 and wants to see what timelines are proposed in the alternate architectures.
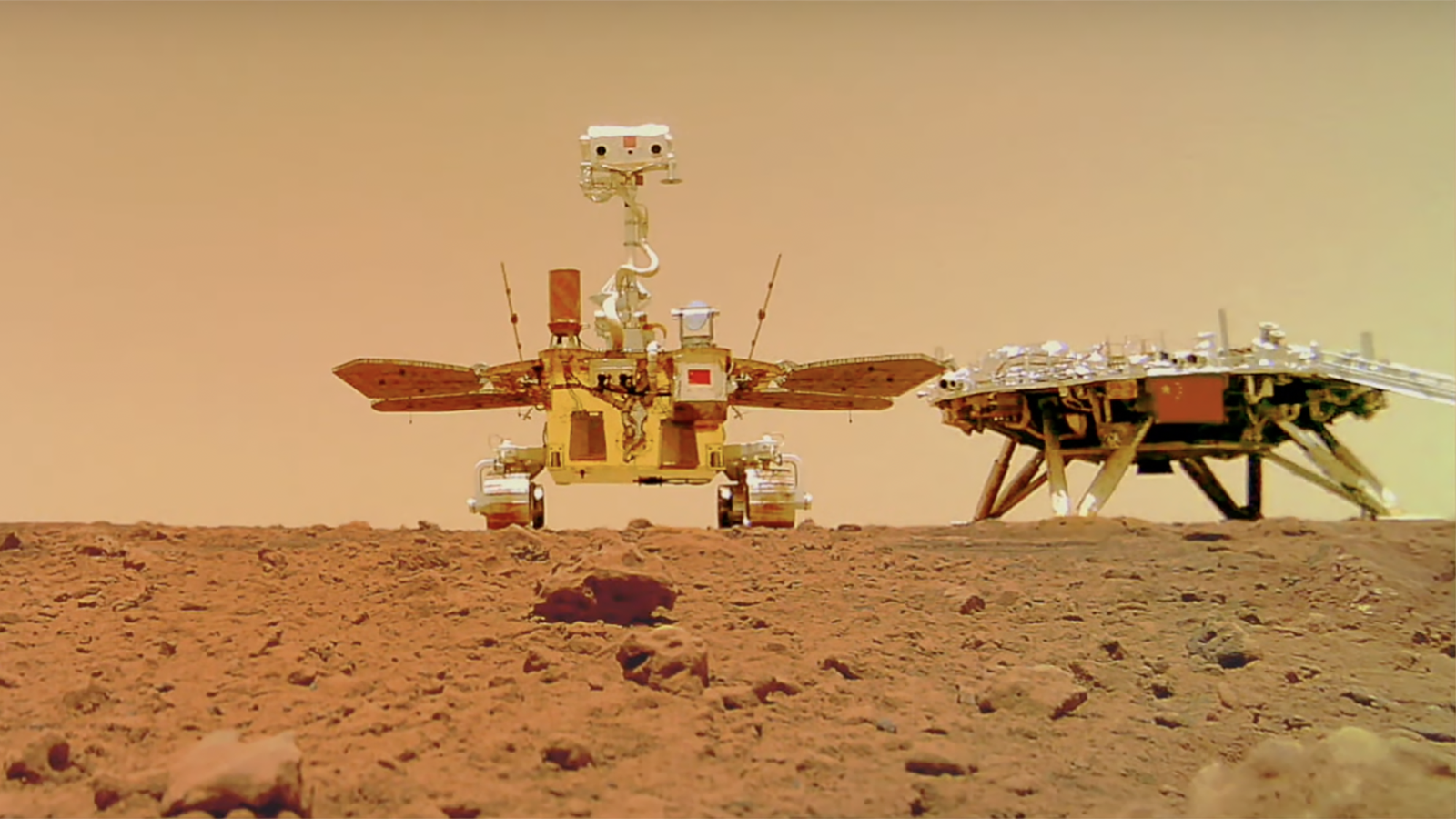
By its successful Chang’e 5 lunar sample return mission and the Tianwen-1 Mars landing in 2021, China is nothing but confident. However, Tianwen-1’s rover, Zhurong, died after just a year, so China has some Martian engineering problems of its own to contend with.
It does seem clear, however, judging by Ingenuity’s history, that it’s being first that matters. The influence of JPL’s little helo shines through all three MarsBird papers, and the authors reference it by name no less than 18 times, with many more references to the earlier research that made Ingenuity possible.
So someday, just as the stranded explorer Mark Watney in “The Martian” dug up NASA’s Pathfinder lander and its Sojourner rover, an astronaut could dig into the rippling dunes of Jezero Crater and recover the sandstorm-buried wreckage of Ingenuity, the first aircraft to fly on a celestial body beyond Earth. But it’s unlikely anybody will search for the wreckage of whichever rotorcraft is second to fly on Mars.
