Getting to know Mars 2020’s circuitry
Dale McKeeby of California-based Pioneer Circuits explains the rover’s innovative circuitry scheme
Our staff here at Pioneer Circuits began working on Mars rovers in 1994 when we received a request from NASA’s Jet Propulsion Lab in California to build circuitry for an upcoming mission now known as Mars Pathfinder. The mission’s 10.6-kilogram rover, called Sojourner, was the first ever on the Martian surface, but when we joined the project, JPL thought mass limits would rule out a rover in favor of a stationary lander. The problem was the weight of the hard wiring necessary to deliver power to the rover’s electronics, including its visual system and the high gain antenna for communications between the rover and the Deep Space Network antennas on Earth. Analysis showed this wiring would weigh 0.7 kilograms — enough to make the rover oversized and overweight.
Pioneer took on the challenge and built a 30-layer flexible printed wiring board, PWB, that replaced all of the hard wiring and reduced the weight to only 87 grams. This multilayer rigid flex PWB construction provided a conduit for communicating data, including telemetry for guidance control and video, while simultaneously supplying electrical power to components. What made the circuitry special was not its constituent components of copper-clad, polyimide film and acrylic adhesive. Rather, it was the manufacturing process. We devised a composite process in which individual sublaminates were bonded together with heat, pressure and adhesives. Our challenge was the structural instability of the base material, which made the part inherently difficult to laminate. We devised tooling that compensated for this inherent instability. Instead of wires, electricity flowed through different circuits in the same rigid board construction through which data was routed. The construction of this PWB is a composite of rigid and flexible circuits that cross from one rigid section to the next with flexible circuit interface. This way, the assembly could be bent to interconnect all of the rover’s communications, telemetry and visual modules.
The little rover, which would have been considered a success if it had lasted only 1 sol or Martian day (about 24 hours and 37 minutes), ended up lasting 90, giving credibility to flexible circuitry for Mars rover applications.
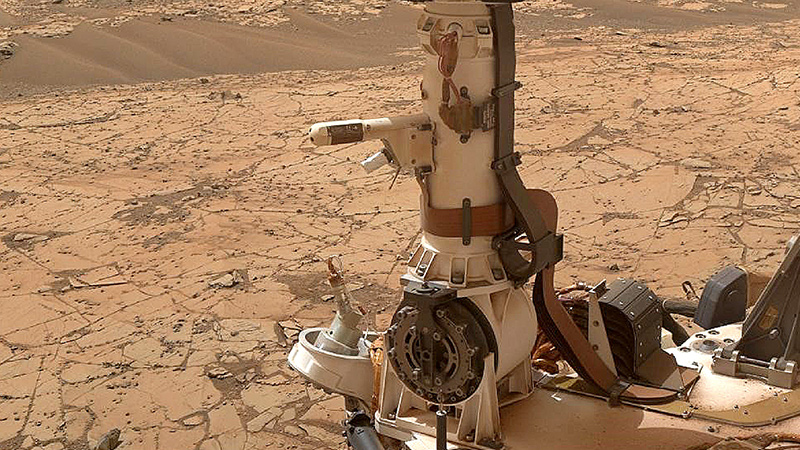
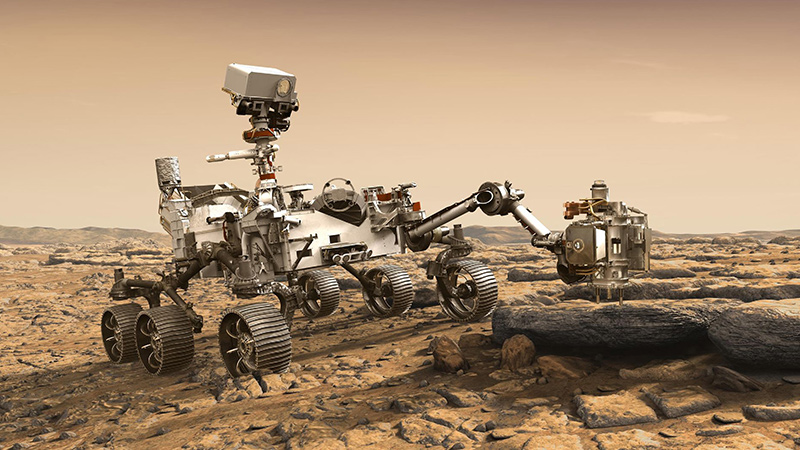
Our contribution to the success of the Mars Pathfinder rover positioned Pioneer as a partner with NASA’s Jet Propulsion Lab for many more robotic discoveries across the red planet, including the Opportunity, Spirit, Curiosity and now, the Mars 2020. This new rover, in assembly at JPL, will weigh in at 1,050 kilograms and measure about the length of a sedan, not including its robotic arm. Its design posed familiar power and circuitry challenges, but in much larger amounts. Mars 2020 must extend its 2-meter-long arm to gather pellet-like core samples of Martian soil and rock with a drill, and take pictures of the samples. Overall, the rover will have 23 cameras compared to Curiosity’s 17. Specifically, a mostly titanium mast will rise from its chassis holding Mastcam-Z, a collection of cameras for zooming in on terrain, taking 3-D pictures and panoramic shots.
These devices will need to receive power from the rover’s two batteries, and commands from the rover’s brain consisting of two Rover Compute Elements. Images must also flow back to the brain for navigation and for transmission to Earth. The circuitry for this must withstand the extreme temperatures of the Martian environment, and the circuitry must be flexible given that the rover will roll across rugged terrain, fold its mast into its upright position and extend its arm to drill samples.
The mast was a special challenge. It must be folded down during landing and will then fold up to properly position Mastcam-Z about 1.5 meters over the rover’s chassis. To deliver power and create a data pathway to Mastcam-Z, we chose an Extended Length Flex Cable similar to those on Curiosity, Spirit and Opportunity. We developed this technology about 20 years ago and tested it with JPL. At the time, we had just learned that the Opportunity and Spirit rovers required a never-before-seen 2.13-meter-long, four-layer, shielded flex circuit to connect all internal electronics, providing the rovers with control, communications and video signal to Earth. To create such a long cable, we devised a proprietary technique for splicing together long flex circuits consisting of polyimide 0.002 mil-thick film and copper-clad sheets. Our splice technology ensures flexibility between the joints via a unique stress relieving technique we developed. We applied this technology to Mars 2020, which needs flex circuits of up to 10.66 meters. Also, because the components of the Mars 2020 rover were more complicated, we needed to condense even more power into these circuits.
The reliability of this “splice” technology and the extended length flex has surpassed even the most optimistic projections. The life span of Opportunity, for instance, was predicted to be 90 days, and as we all know, Opportunity is still generating pictures and scientific data from the Martian surface today.
Mars 2020 posed a unique challenge for our splice flex circuits. These must deliver electricity from the rover’s two batteries to its electronics, including the 23 cameras, and also provide data pathways to help the rover navigate, avoid hazards and take images of samples. The large number of cameras meant we had to increase the layer count for the flex from four to six to connect such complex modules. With the splice technology. I worked closely with the JPL team, when they brought a mock-up of the mast here to our facilities, to make sure the upgrades to the flex circuit would work and be just as reliable for the Mars 2020 rover.
Also, the electronics inside these cameras utilize rigid flex circuits, which combine the durability of rigid circuits with the reliability and flexibility of flex circuits. The main objectives of using flex and rigid flex circuits was to overcome space and weight confinements as well as to improve reliability as we did for the original Mars Pathfinder Sojourner rover. Back during development of the other rovers, I recall sitting in a NASA board meeting with JPL where different project managers were answering questions. One key question was what percentage of hard wiring on the rovers after Sojourner could be replaced by flex circuits. The answer to this was 17 to 20 percent, which satisfied the NASA question. This meeting laid a strong foundation and path forward for the JPL team and me to work on the rigid flex parts for future rovers.
For Mars 2020, we relied on mock-ups to develop the tightest and most robust configurations that would also have the highest reliability. I provided open communication with the JPL team, providing weekly updates and sharing challenges of the different configurations along the way. JPL then pulled up original design drawings from previous rovers and worked with us to update it for the new configuration.
The rover’s human-like arm will have a Force Torque Sensor to detect the forces applied to the arm to give the robot feedback and help it be flexible and adaptable in its movements. Several companies including JPL and Motiv Space Systems came to Pioneer for help with multilayer flex circuit manufacturing as well as the difficult final assembly. The arm’s newly developed, multilayer flexible circuit package provides for finer torque control. In fact, the Force Torque Sensor system is the most complex flex circuit assembly ever integrated into a Mars rover arm.
Overall, Mars 2020 adds to the list of flexible circuit technologies that power the capabilities of Mars rovers.
Dale McKeeby is vice president of engineering at Pioneer Circuits of Santa Ana, California. He joined the company in 1991 and now leads research and development, concurrent engineering, and prototype manufacturing for the Deep Space sector. Pioneer’s other business sectors are military applications, satellites and avionics. Email [email protected]